
|
Hvorfor skal RS være din kilde til teknik og inspiration?

Uanset størrelsen på din udfordring, er vi kilden til løsningen. RS er den eneste virksomhed, der tilbyder dig ét samlet sted med resurser til at forske, designe, bygge prototyper samt til at opbygge og vedligeholde produkter og applikationer.
Vi ønsker at være din primære kilde til teknik og inspiration, uanset om det er indenfor udvikling, konstruktion, vedligeholdelse - eller et sted midt imellem.
Hvorfor RS?
 Vi ved, hvad vores kunder har brug for, og vi gør tingene nemme for dem. Vi har en bred vifte af produkter og ydelser, og tilføjer hele tiden flere. Særligt imponerende er vores udvalg indenfor teknik, nye produkter og DesignSpark-værktøjer.
Vi ved, hvad vores kunder har brug for, og vi gør tingene nemme for dem. Vi har en bred vifte af produkter og ydelser, og tilføjer hele tiden flere. Særligt imponerende er vores udvalg indenfor teknik, nye produkter og DesignSpark-værktøjer.
Dette giver dig tryghed for, at du kan finde alt, hvad du behøver, hos RS, og det er tilgængeligt med et enkelt klik.
Med nye produkter, der konstant lanceres, kan du være på forkant indenfor dit felt. Vi tilbyder også produkter i høj kvalitet fra vores eget mærke, RS Pro, der består af højtydende komponenter til meget overkommelige priser.
Vi har 500.000 produkter på lager globalt, til bestilling, så snart du har brug for dem, med levering næste arbejdsdag via et globalt netværk af distributionscentre. Og når du har brug for ekstra hjælp eller vejledning, står vores dedikerede kundeservice og tekniske teams klar til at gøre alt, hvad de kan, for at hjælpe dig.
RS er ikke bare et sted for teknikere - RS er dit sted. Vi har løsningen til hvert enkelt af dine udfordringer og tilbyder personlig service til alle vores kunder.
Vi ønsker, at du føler dig hjemme, når du bruger vores tjenester, og at du altid vælger os som din førsteprioritet.
Kilde til inspiration
 Men vi kan mere end bare at tilbyde produkter – som virksomhed mener vi, at det er vigtigt at støtte ambitionerne og inspirationen hos hver eneste kunde, der henvender sig til os.
Men vi kan mere end bare at tilbyde produkter – som virksomhed mener vi, at det er vigtigt at støtte ambitionerne og inspirationen hos hver eneste kunde, der henvender sig til os.
For at fremme kommende generationers muligheder for at forfølge deres drømme, deler og støtter vi vores kunders og leverandørers bemærkelsesværdige historier fra det virkelige liv. Historier om mennesker, der har opnået utrolige bedrifter.
Oplev de ekstraordinære rejser, som nogle af vores kunder har taget, og få mere at vide om, hvordan RS støtter nye ideer.
Vores kunder er mennesker med store ideer, der indimellem har brug for lidt hjælp. Til dem tilbyder vi DesignSpark - et onlinefællesskab, som giver masser af værktøjer og ekspertise til at gøre de store idéer til virkelighed. Vi forstår nemlig, hvad du har brug for at vide, og vi vil gerne hjælpe dig med hurtigt og nemt at finde løsninger på dine udfordringer.
Vi er klar til at hjælpe dig
Vi har ressourcer til alle aspekter indenfor teknisk arbejde. Uanset om du er tekniker inden for elektronik, mekanik, automatik eller vedligeholdelse, om du er ingeniør eller en entusiastisk designer, står vi klar til at hjælpe dig.
Vi har det rigtige produkt, en unik kundeservice og den nødvendige rådgivning, så du kan nå de mål, du sætter dig for.
Men det stopper ikke her. Få mere at vide med artikler om mekatronik på farten og anvendelse af sensorer i mekatronikteknologier.
Indsigt om industrien
Vi mødte nogle af vores førende leverandører for at diskutere aktuelle trends inden for industri
Se videoen for at finde ud af, hvordan de har set industrielle ændringer i løbet af deres karriere, hvad deres tanker er om virkningen af mekatronik, og hvad de forudsiger om fremtidens teknik, når alt bliver digitalt.

DesignSpark
![]() DesignSpark er vores ingeniørfællesskab. Det er en online platform, der giver passionerede ingeniører mulighed for at dele ideer og finde ressourcer eller værktøjer til at hjælpe med projekter. Tjek nogle af de inspirerende artikler på DesignSpark, skrevet af andre ingeniører!
DesignSpark er vores ingeniørfællesskab. Det er en online platform, der giver passionerede ingeniører mulighed for at dele ideer og finde ressourcer eller værktøjer til at hjælpe med projekter. Tjek nogle af de inspirerende artikler på DesignSpark, skrevet af andre ingeniører!

The team at the Raspberry Pi Foundation have been developing the next generation of Raspberry Pi Compute Module, known as CM3.

Introducing the Intel RealSense ZR300 camera, featuring object and person recognition and 6DoF Simultaneous Localisation and Mapping.

Discover more about the Braccio Tinkerkit and how it’s a low cost and fun way to start your journey into robotics.

Check out this guide to the MeArm Robot Kit V1.1, which comes with all of the products you need to build a complete robot arm.
Udvalgte produkter
Se udvalgte produkter fra nogle af vore førende producenter.






Hvad er der indeni en PLC?
Se komponenterne inden i en PLC – fra digital input, serielle porte og wire-to-board konnektorer over adskillelse, hukommelse og en lang række passive. Find ud af hvordan de virker sammen og styrer en industriel proces.
Sådan opstod mekatronik
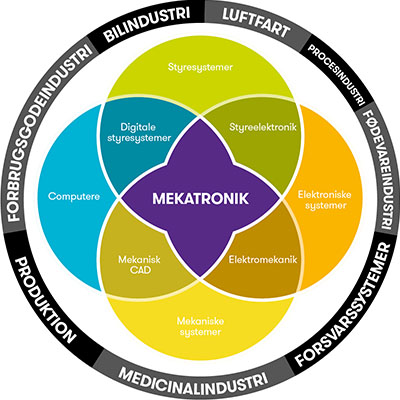
Mekatronik kombinerer elementer fra mekanik, elektronik og computer-teknologi ved design, konstruktion og bygning af produkter. Det anvendes i løsninger inden for transportområdet, optisk telekommunikation og medikoteknik for blot at nævne nogle få.
Udtrykket “mekatronik” blev første gang omtalt i 1969
af Tetsuro Mori, ingeniør hos robotvirksomheden
Yaskawa Electric Corporation. Det er en
kombination af ordene mekanik og elektronik.
For at kunne konkurrere på et globalt marked
skal moderne produktionsvirksomheder være i
stand til at integrere elektronik, styring, software
og maskinbygning i en række innovative
produkter og systemer.
Det er her, vi kommer ind i billedet. Som din kilde
til teknik og inspiration har vi alle de produkter,
du skal bruge, fra branchens førende mærker.
Mekatronik på fremmarch
 I 1768 besluttede den schweiziske urmager Pierre Jaquet-Droz, at han havde brug for en måde at øge salget på. Med sin søn og en musiker, Jean-Frédéric Leschot, konstruerede han tre indviklede mekaniske robotter. Den mest komplekse kunne styres af et hjul, så den kunne skrive bogstaver baseret på indstillingerne på 40 aksler.
I 1768 besluttede den schweiziske urmager Pierre Jaquet-Droz, at han havde brug for en måde at øge salget på. Med sin søn og en musiker, Jean-Frédéric Leschot, konstruerede han tre indviklede mekaniske robotter. Den mest komplekse kunne styres af et hjul, så den kunne skrive bogstaver baseret på indstillingerne på 40 aksler.
Med det 18. århundredes teknologi måtte Jaquet-Droz og hans kolleger begrænse sig til mekaniske gear, løftestænger og remskiver. Men de formåede stadig at skabe automatik, der fortsætter med at fascinere besøgende på museet i Neuchâtel, hvor de udstilles. Vor tids robotbyggere har mange flere muligheder til deres rådighed. Enheder som stepmotoren synes at være det indlysende valg til at få systemer til at bevæge sig. Men der er ofte tilfælde, hvor en anden teknologi giver mest mening. Selv gelélignende materialer kan anvendes inden for programmerbar bevægelse.
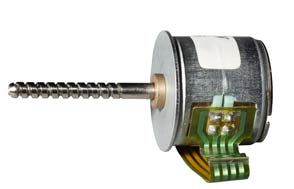 Inden for robotteknologi og lignende mekatronikanvendelser er stepmotoren stadig et populært valg. Bevægelserne behøver ikke være roterende. Ledeskruer og lignende mekaniske komponenter som f.eks. dem, der blev fremstillet af Igus og Thomson Linear, kan let omsætte rotationen fra en motor til lineær bevægelse. Motorer som f.eks. Faulhabers Bipolar Disc Magnet Stepper har ofte integrerede ledeskruer.
Inden for robotteknologi og lignende mekatronikanvendelser er stepmotoren stadig et populært valg. Bevægelserne behøver ikke være roterende. Ledeskruer og lignende mekaniske komponenter som f.eks. dem, der blev fremstillet af Igus og Thomson Linear, kan let omsætte rotationen fra en motor til lineær bevægelse. Motorer som f.eks. Faulhabers Bipolar Disc Magnet Stepper har ofte integrerede ledeskruer.
Stepmotoren bygger på den grundlæggende DC-motor, som roterer så længe strøm tilføres, men gør det muligt at bevæge sig let til en indstillet drejeposition, før den stopper. Denne tilgang understøtter applikationer, som kræver præcis positionering og hastighedsstyring.
Stepmotoren er bygget med en fast stator, der anvender en række separate spoleviklinger. Dette styrer placeringen af en rotor, der enten bruger en permanent magnet eller sine egne spoleviklinger som udgør en magnet, når der tilføres strøm. De faste spoleviklinger bruges til at danne magnetfelter dynamisk på to eller flere steder på statoren.
Når strømmen tilsluttes, roterer den magnetiserede rotor til den mest stabile position, den kan finde, idet dens eget magnetiske felt tilpasses til statorens aktive spole. Når det er tid til at flytte til en ny position, lukker spolen ned og erstattes af en anden, hvilket tvinger rotoren til at bevæge sig igen. Stepmotorer som RS Pro Hybrid tilbyder diskrete trinvinkler så små som 0,9 °. Imidlertid er positioneringsnøjagtigheden af stepmotorer ikke begrænset til diskrete trin. Mikrostepping med mikroprocessor- eller logikstyring gør det muligt at opbygge yderst nøjagtige positionssystemer med vilkårlige og effektive trinvinkler.
I stedet for helt at fjerne strøm fra en spole, mens en anden tilsluttes, bliver strømmen reduceret i den ene, mens strømmen i en anden stiger. Kontrol af strømbalancen gør det muligt at implementere mindre virtuelle trin mellem de fulde trin, der implementeres fysisk.
Selv om stepmotoren tillader næsten kontinuerlig bevægelseskontrol gennem mikrotrin, kan det have ulemper, hvor høj hastighed er vigtig. Motorerne bruges ofte ved lave hastigheder for at give maksimal drejningsmoment og styring. Nogle produkter som f.eks. Portescap Disc Magnet-stepmotoren kan dog opnå høj acceleration og rotationshastigheder på mere end 10.000 omdrejninger pr. minut.
En kontinuerlig variabel konstruktion, som en børsteløs motor, kan tilvejebringe kombinationen af højt moment og nøjagtig positionering. Traditionelt blev AC-motorer brugt i applikationer på grund af deres relative lave priser, og hvor bevægelsesnøjagtighed ikke er en prioritet. Problemer med drejningsmoment ved lav hastighed har medført, at avancerede styringer nu anvendes på vekselstrømsmotorer. Feltorienterede styringsteknikker bruges nu i vid udstrækning til at forbedre effektiviteten af vekselstrømsmotorer og deres drejningsmoment ved lave hastigheder og har gradvist gjort den børsteløse motor til en konkurrent i situationer, hvor der kræves både høj effekt og nøjagtighed.
Under vektororienteret styring opdateres en matematisk model af motorens magnetfelter mange gange i sekundet for at give et estimat over forholdet mellem spænding, hastighed og drejningsmoment inde i motoren. Lukkede styringsalgoritmer justerer spændings- og strømniveauerne dynamisk til hver af viklingerne inde i motoren for ikke blot at maksimere drejningsmomentet, men også for at flytte rotoren til bestemte positioner. En fordel ved disse styringsteknikker er, at estimaterne ofte er nøjagtige nok til at undlade brugen af yderligere positionssensorer, hvilket bidrager til at reducere de samlede systemomkostninger. Nøglekravet er en højpræstationsprocessor, f.eks. den integrerede ADSP-BF547 Blackfin-processor fra Analog Devices, samt dedikerede system-on-chip-controllere (SoC), der forenkler implementeringen af vektororienteret styring for brugere. Eksempler herpå er Toshiba TMPM370-serien af SoC’er, som kombinerer en ARM Cortex-M3-processorkerne med en dedikeret vektororienteret styrings-coprocessor og grænseflade til motorstyringen.
I situationer, hvor mindre kraft er påkrævet, men høj nøjagtighed i begge retninger er afgørende, er svingspoleaktuatoren et godt valg. Svingspoleaktuatoren er en enhed, der virker efter samme princip som en højttaler.
Svingspoleaktuatoren er blevet den foretrukne enhed i små mekatroniske systemer, f.eks. fokuseringsmekanismerne til smartphone-objektiver.
I elektriske termer er svingspoleaktuatorer enfasede motorer og kan derfor styres på samme måde som simple DC-motorer. De fungerer normalt godt hvor der er hørbar støj, og derfor bruges de i mobile enheder, og de har samtidig lav hysterese.
 En anden tilgang til bevægelseskontrol er at bruge trykluft eller væske til at skubbe mod stempler. Fordi de er mindre tilbøjelige til at lække væske, bruges pneumatiske systemer oftest i mindre mekatroniske systemer. Selvom pneumatisk bevægelsesstyring typisk er forbundet med store industrielle controllere, giver den mulighed for at bygge robotter, der bevæger sig på samme måde som mennesker og dyr.
En anden tilgang til bevægelseskontrol er at bruge trykluft eller væske til at skubbe mod stempler. Fordi de er mindre tilbøjelige til at lække væske, bruges pneumatiske systemer oftest i mindre mekatroniske systemer. Selvom pneumatisk bevægelsesstyring typisk er forbundet med store industrielle controllere, giver den mulighed for at bygge robotter, der bevæger sig på samme måde som mennesker og dyr.
Stemplerne kan anvendes sammen med leddene til at fungere som kunstige muskler. De er f.eks. blevet brugt i rehabiliteringsrobotter, hvor de hjælper folk med at komme sig efter alvorlige skader, så de kan stå og bevæge sig rundt, eller de yder modstand i fysioterapiøvelser.
I mange situationer er kontinuerlig kontrol over bevægelse ikke nødvendig. Bevægelsen skal måske blot åbne eller lukke en ventil: En handling, der kan være en del af et hydraulisk eller pneumatisk system. Det er her magnetventilen er en god løsning. Den består af en ledende spole, som er viklet rundt om et bevægeligt metalarmatur. Magnetventilen gør brug af Faradays induktionslov: Armaturet bevæger sig i en retning, der øger spolens induktans.
Typisk tvinger strøm til magnetventilen armaturet til en ny position. En almindelig konfiguration for en ventil er normalt lukket: Gennemstrømning er blokeret af armaturet, når der ikke tilføres strøm. Når strøm tilføres, bevæger armaturet sig til en position, der tillader væske eller luft at passere. Et eksempel på denne type magnetventil beregnet til pneumatisk styring er Parker Viking Extreme G.
 Selvom mange magnetventiler er designet til simple til/fra-tilstande, anvendes proportionale magnetventiler også i nogle designs for at give variabel styring. Den proportionale magnetventil balancerer den maksimale kraft mod en fjeder. Begyndende fra meget lave niveauer bevæger en øgning af strømmen gradvist magnetventilen til sin fulde kapacitet. Et problem med den proportionale magnetventil er hysterese: At reducere strømmen til et bestemt niveau genopretter ikke nødvendigvis armaturet til det samme punkt, som inden strømmen blev øget til det niveau. Hvor der kræves lav hysterese, er en lineær svingspoleaktuator sandsynligvis et bedre valg.
Selvom mange magnetventiler er designet til simple til/fra-tilstande, anvendes proportionale magnetventiler også i nogle designs for at give variabel styring. Den proportionale magnetventil balancerer den maksimale kraft mod en fjeder. Begyndende fra meget lave niveauer bevæger en øgning af strømmen gradvist magnetventilen til sin fulde kapacitet. Et problem med den proportionale magnetventil er hysterese: At reducere strømmen til et bestemt niveau genopretter ikke nødvendigvis armaturet til det samme punkt, som inden strømmen blev øget til det niveau. Hvor der kræves lav hysterese, er en lineær svingspoleaktuator sandsynligvis et bedre valg.
I fremtiden vil innovative materialer som hydrogel udgøre yderligere måder at styre bevægelse på. Nogle polymerhydrogel kan give store volumenændringer, når et elektrisk felt påføres. Dette gør dem egnede i situationer, hvor der kræves en kunstig muskel, eller hvor aktiv dæmpning sammen med bevægelse er en fordel. Sådanne materialer er dog stadig på et tidligt stadie, og de elektromekaniske systemer, der er beskrevet ovenfor, vil forblive de oplagte valg for mekatroniske designere i den nærmeste fremtid. Men det er klart, at der er mange valgmuligheder til rådighed takket være ægteskabet mellem elektronik og mekanik, der hver især leverer sine egne fordele til et bestemt scenarie.
Sensorer på fremmarch
 Internet of Things (IoT), som vi kender det i dag, er kun begyndelsen på en revolution, der vil gøre vores omgivelser smartere. Da IoT er fokuseret på sensorer, der overfører data til intelligent software, som kører på servere, kan det virke som at det er et overvejende passivt system. IoT understøtter beslutninger snarere end implementerer dem. Mekatronik slutter cirklen ved at levere aktiv interaktion, der giver større bekvemmelighed og effektivitet overalt i industrien, i hjemmet og indenfor transport.
Internet of Things (IoT), som vi kender det i dag, er kun begyndelsen på en revolution, der vil gøre vores omgivelser smartere. Da IoT er fokuseret på sensorer, der overfører data til intelligent software, som kører på servere, kan det virke som at det er et overvejende passivt system. IoT understøtter beslutninger snarere end implementerer dem. Mekatronik slutter cirklen ved at levere aktiv interaktion, der giver større bekvemmelighed og effektivitet overalt i industrien, i hjemmet og indenfor transport.
Robotter kan hjælpe os med at udføre de daglige gøremål og understøtte produktion og levering af services. Noget af deres funktionalitet anvendes i selvkørende motorkøretøjer, som transporterer os rundt. For at gøre det sikkert og effektivt, skal disse robotter have en forståelse for, hvor de befinder sig. Det havde ældre generationer af fabriksrobotter og produktionsudstyr ikke. De opererede indhegnet i sikre miljøer og fulgte forudsigelige, forprogrammerede baner. For at kunne blive mere fleksibelt og følsomt skal den næste generation af produktionsudstyr kunne overvåge ikke bare sine egne, men også andres bevægelser på arbejdspladsen.
Som følge heraf er der to elementer i sensorproblemet for mekatronik. Det ene er at sikre, at placeringen af hver bevægelig del er i overensstemmelse med styringsalgoritmens interne model. For lidt over et årti siden ville de sensorer, der kræves til denne slags analyse af et mekatronikbaseret system, ikke have været teknisk muligt. Selv de enklere og mere grundlæggende tilgængelige systemer ville have været dyre at producere. Men lanceringen af Nintendo Wii ændrede den måde designerne indarbejdede bevægelsesfølere i deres systemer på. Wiis håndholdte fjernbetjeninger indeholdt accelerometre for at registrere, hvordan en gamer flyttede dem rundt. Apples iPhone gik et skridt videre. Produktet, og de mange smartphones det inspirerede, omfattede meget mere end accelerometre.
Nutidens mobile enheder indeholder accelerometre, gyroskoper og tryksensorer samt modtagere for at opfange GNSS-tjenester (Global Navigation Satellite System). Resultatet er en samling af input i realtid, der kan lokalisere enheden stort set overalt i verden.
Der er en grund til, at mobile enheder som f.eks. smartphones indeholder en række sensorer til at registrere bevægelser. Selvom de ikke er designet specifikt til opgaven, kan en gruppe af accelerometre arrangeret ortogonalt langs x-, y- og z-akserne registrere rotation samt bevægelse langs en lineær linje. Men accelerometeret lider af unøjagtigheder, der hurtigt kan føre til fejl ved positionsangivelse. Desuden kan accelerometre komme i tvivl, når systemet ikke bevæger sig. En konstant kilde til fejl er acceleration som følge af tyngdekraften. Det kan være svært for et accelerometer alene at skelne mellem disse to accelerationskomponenter.
Et højpasfilter giver adgang til en mekanisme til filtrering af tyngdekraftskomponenten for acceleration, samtidig med at der opretholdes input fra de forventede hurtigere skiftende accelerationskomponenter som følge af fysisk bevægelse. Et højpasfilter skal ofte kobles sammen med et lavpasfilter for at fjerne støjkilder fra højfrekvente småvibrationer. Selv da kan accelerometeret akkumulere fejl fra de mange støjkilder, der påvirker det.
Gyroskopet er, i modsætning til accelerometeret, beregnet til at registrere rotationsbevægelser, men leverer også supplerende signaler udover dem fra accelerometre. Disse input kan eliminere de generende støjkilder efter digital signalbehandling.
 Et andet sæt støjkilder påvirker gyroskopet. Drift er den mest almindelige årsag til fejl, som akkumuleres over tid. Kalibreringsmålinger på gyroskopsensorer hjælper med at reducere fejl, der skaber drift: De giver en kompensationsværdi, der kan tilføjes integrations-loopet. Men i systemer, der har mere end én type bevægelsessensor, er der en anden mulighed: Multisensor-integration.
Et andet sæt støjkilder påvirker gyroskopet. Drift er den mest almindelige årsag til fejl, som akkumuleres over tid. Kalibreringsmålinger på gyroskopsensorer hjælper med at reducere fejl, der skaber drift: De giver en kompensationsværdi, der kan tilføjes integrations-loopet. Men i systemer, der har mere end én type bevægelsessensor, er der en anden mulighed: Multisensor-integration.
Som navnet antyder, omfatter multisensorintegration en gruppe af algoritmer, der kombinerer input fra forskellige typer af sensorer og bruger dem til at bygge en virtuel sensor, der er mere præcis og pålidelig end nogen af de enkelte elementer.
Der findes nu en række teknikker nu til at udføre multisensorintegration, der fungerer godt til overvågning af bevægelser. Et eksempel på almindelig brug er Kalman-filteret. Som udgangspunkt giver Kalman et vægtet gennemsnit af sensormålinger. Ikke blot et simpelt gennemsnit, men også ét, der tager højde for usikkerhed. Opdateringer, som algoritmen betragter som værende mere nøjagtige, får en større vægtning end dem, der menes at have en større usikkerhed. Denne evne til at tilpasse sig ændringer i sensorens ydeevne, der virker usædvanlige i forhold til den forventede status, leveret af filterets interne model, giver mere solide svar, som bidrager til at forbedre den overordnede pålidelighed.
Sensorhub-IC’er er dukket op på markedet, og de gør det nemmere at integrere data fra flere forskellige sensortyper og understøtte sensorfusionsalgoritmer. Med hardware-baserede filtre kan de aflaste mikroprocessoren. Dette kan reducere systemomkostningerne og strømforbruget sammenlignet med algoritmer, som udelukkende er baseret på software. Yderligere integration har medført enheder, der kombinerer hub-funktioner med selve sensorerne og behandlingen, der kræves for at implementere fusionsteknologier som f.eks. Kalman-filtrering. Et eksempel er Bosch Sensortec BNO055, som understøttes af virksomhedens FusionLib-software.
Takket være kombinationen af accelerometer, gyroskop og geomagnetisk sensor giver BNO055 mulighed for at registrere bevægelse på tværs af ni akser med FusionLib-software, der knytter målingerne sammen til et sammenhængende hele. Med den integrerede enhed behøver kunder ikke at udvikle deres egne drivere og integrationsalgoritmer.
Bevægelsessensorer i sig selv giver en robot et ensartet billede af sine egne bevægelser. Men for at kunne bevæge sig sikkert, skal maskinerne være i stand til at registrere bevægelser rundt om sig selv. Det er hér den anden brede gruppe af sensorer, der er nødvendige for sikker og effektiv mekatronisk bevægelse, bliver aktuel. Denne gruppe sikrer at hele det bevægelige system ikke kolliderer utilsigtet med andre genstande og sikrer, at systemet ved, hvor det befinder sig. En række forskellige sensorteknologier fylder dette område.
De enkleste er sensorer, der registrerer, om der er forhindringer. Der findes en række teknologier, der understøtter denne anvendelse. Nogle robotter anvender nu tryksensorer på deres overflade, så de kan stoppe, når de kommer i kontakt med en forhindring eller et objekt, de forventes at håndtere. Typisk fungerer denne fremgangsmåde med langsomme enheder, og hvor robotten leverer meget lidt kraft. Lysgardiner samt infrarøde nærhedssensorer giver også mulighed for at registrere forhindringer uden at komme i kontakt med et andet objekt. Begge bruger refleksionen fra bølger, der kastes tilbage fra objektet for at bestemme den relative afstand til forhindringen.
Vision-sensorer understøtter mere avanceret styring af mekatroniske systemer. De omfatter ikke kun konventionelle kameraer, men også time-of-flight-kameraer, f.eks. Infineon Technologies' REAL3-sensor, der kan kortlægge komplekse 3D-rum i synsfeltet. Udviklingen af nye virtual reality-teknologier hjælper med at nedbringe udgifterne til sådanne enheder, så de bringes inden for rækkevidde af mange autonome mekatroniske systemer: På samme måde som markedet for ADAS (Advanced Driver Assistance Systems) er med til at udvikle billigere lidar- og radarsensorer. Et eksempel på radarteknologi, der anvendes i industrielle miljøer, er Infineons BGT24M/L-serie af milimeterbølge-IC'er.
Nøglen til at gøre brug af mere avancerede sensorer som f.eks. radar- og 2D- og time-of-flight-kameraer ligger i avancerede algoritmer baseret på AI-teknologier som f.eks. deep learning. Et centralt emne for mobil mekatronik er strømforbruget. Oprindeligt blev deep learning implementeret på avancerede mikroprocessorer og GPU’er (Graphical Processing Units) med tilsvarende høje effektforbrug. I dag har maskinbyggere specialiseret udstyr som f.eks. Movidius Myriad-2 SoC til rådighed. Det bruges allerede i førersystemer i biler, og Myriad-2 er en visionprocessor, der er optimeret til deep learning og interferens i realtid. De understøttes af frit tilgængelig software som f.eks. Caffe og Tensorflow, og mekatronik-integratorer kan nemt udforske mulighederne ved hjælp af den praktiske Neural Network Compute Stick, som sættes i en USB-port.
Ved hjælp af avancerede sensorhubs og udviklingsorienterede værktøjer som Neural Network Compute Stick bliver det meget nemmere for udviklere, der arbejder med mekatronik og robotteknologiske systemer, at opgradere funktionaliteten af deres designs og gøre dem mere mobile. Efterhånden som markedet vokser, vil det medvirke til at reducere omkostningerne yderligere og give flere løsninger, hvilket gør intelligent bevægelse til en vigtig del af det spirende IoT.
Udvalgte brands












Deltag i debatten! #RSHome
|
|
|||||